Лекция № 1
«Аналоговые,
дискретные и цифровые сигналы.»
Двумя
самыми фундаментальными понятиями в данном курсе являются понятия сигнала и
системы.
Под сигналом понимается физический процесс (например, изменяющееся во времени
напряжение), отображающий некоторую информацию или сообщение. Математически
сигнал описывается функцией определенного типа.
Одномерные
сигналы описываются вещественной или комплексной функцией ![]() , определенной на интервале вещественной оси (обычно – оси
времени)
, определенной на интервале вещественной оси (обычно – оси
времени) ![]() . Примером одномерного сигнала может служить электрический
ток в проводе микрофона, несущий информацию о воспринимаемом звуке.
. Примером одномерного сигнала может служить электрический
ток в проводе микрофона, несущий информацию о воспринимаемом звуке.
Сигнал
x(t) называется ограниченным
если существует положительное число A, такое, что для любого t ![]() .
.
Энергией сигнала x(t) называется величина
 , (1.1)
, (1.1)
Если ![]() ,
то говорят, что сигнал x(t) имеет ограниченную
энергию. Сигналы с ограниченной энергией обладают свойством
,
то говорят, что сигнал x(t) имеет ограниченную
энергию. Сигналы с ограниченной энергией обладают свойством
![]() .
.
Если сигнал
имеет ограниченную энергию, то он ограничен.
Мощностью сигнала x(t) называется величина
 , (1.2)
, (1.2)
Если ![]() , то говорят, что сигнал x(t) имеет ограниченную
мощность. Сигналы с ограниченной мощностью
могут принимать ненулевые значения сколь угодно долго.
, то говорят, что сигнал x(t) имеет ограниченную
мощность. Сигналы с ограниченной мощностью
могут принимать ненулевые значения сколь угодно долго.
В
реальной природе сигналов с неограниченной энергией и мощностью не существует.
Большинство сигналов, существующих в реальной природе
являются аналоговыми.
Аналоговые
сигналы
описываются непрерывной (или кусочно-непрерывной) функцией ![]() , причем сама функция и аргумент t могут принимать любые
значения на некоторых интервалах
, причем сама функция и аргумент t могут принимать любые
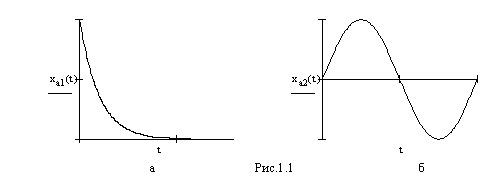
значения на некоторых интервалах ![]() . На рис. 1.1а представлен пример
аналогового сигнала, изменяющегося во времени по закону
. На рис. 1.1а представлен пример
аналогового сигнала, изменяющегося во времени по закону ![]() , где
, где ![]() . Другой пример аналогового сигнала, показанный на рис 1.1б,
изменяется во времени по закону
. Другой пример аналогового сигнала, показанный на рис 1.1б,
изменяется во времени по закону ![]() .
.
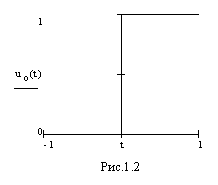
Важным примером аналогового
сигнала является сигнал, описываемый т.н. «единичной
функцией», которая описывается выражением
![]() (1.3),
(1.3),
где  .
.
График единичной функции
представлен на рис.1.2.
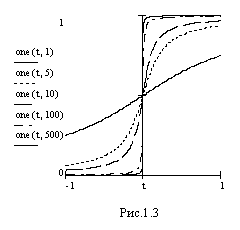
Функцию 1(t) можно
рассматривать как предел семейства непрерывных функций 1(a,t) при изменении параметра
этого семейства a.
![]() (1.4).
(1.4).
Семейство графиков 1(a,t) при различных значениях a представлено на рис.1.3.
В этом случае функцию 1(t) можно
записать как
![]() (1.5).
(1.5).
Обозначим производную от 1(a,t) как d(a,t).
![]() (1.6).
(1.6).
Семейство графиков d(a,t) представлено на рис.1.4.
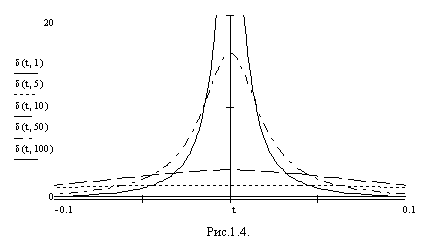
Площадь под кривой d(a,t) не зависит от a и всегда равна 1. Действительно
 (1.7).
(1.7).
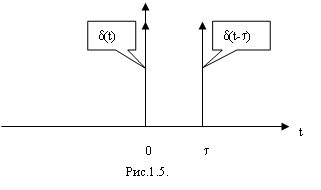
Функция
![]() (1.8)
(1.8)
называется импульсной
функцией Дирака или d-функцией. Значения d-функции равны нулю во всех точках,
кроме t=0. При t=0 d-функция равна бесконечности, но так, что площадь
под кривой d-функции равна 1. На рис.1.5 представлен график
функции d(t) и d(t-t).
Отметим некоторые свойства d-функции:
1.
![]() (1.9).
(1.9).
Это следует из того, что ![]() только при t=t.
только при t=t.
2.  (1.10).
(1.10).
В интеграле бесконечные пределы можно заменить
конечными, но так, чтобы аргумент функции d(t-t) обращался в нуль внутри
этих пределов.
 (1.11).
(1.11).
3.
Преобразование Лапласа d-функции
 (1.12).
(1.12).
В частности, при t=0
![]() (1.13).
(1.13).
4. Преобразование Фурье d-функции. При p=jv из 1.13 получим
![]() (1.14)
(1.14)
При t=0
![]() (1.15),
(1.15),
т.е. спектр d-функции равен 1.
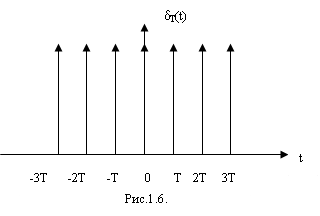
Аналоговый
сигнал f(t) называется периодическим если существует действительное число T,
такое, что f(t+T)=f(t) для любых t. При
этом T называется периодом сигнала. Примером периодического сигнала может
служить сигнал, представленный на рис.1.2а, причем T=1/f. Другим примером
периодического сигнала может служить последовательность d-функций, описываемая
уравнением
![]() (1.16)
(1.16)
график которой представлен на
рис.1.6.
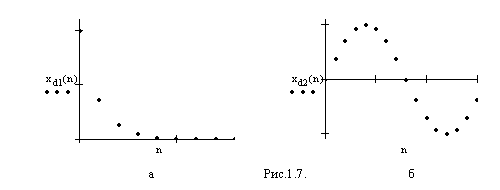
Дискретные сигналы отличаются от аналоговых тем, что их значения известны лишь в
дискретные моменты времени. Дискретные
сигналы описываются решетчатыми функциями – последовательностями – xд(nT),
где T =const – интервал (период) дискретизации, n=0,1,2,….
Сама функция xд(nT)
может в дискретные моменты принимать произвольные значения на некотором
интервале. Эти значения функции называются выборками или отсчетами функции.
Другим обозначением решетчатой функции x(nT)
является x(n) или xn. На рис. 1.7а и 1.7б представлены примеры
решетчатых функций ![]() и
и ![]() . Последовательность x(n) может быть конечной или
бесконечной, в зависимости от интервала определения функции.
. Последовательность x(n) может быть конечной или
бесконечной, в зависимости от интервала определения функции.
Процесс преобразования
аналогового сигнала в дискретный называется временная дискретизация. Математически
процесс временной дискретизации можно описать как модуляцию входным аналоговым
сигналом последовательности d-функций dT(t)
![]() (1.17)
(1.17)
Процесс восстановления аналогового сигнала из дискретного называется временная экстраполяция.
Для дискретных последовательностей также
вводятся понятия энергии и мощности. Энергией последовательности x(n) называется
величина
![]() , (1.18)
, (1.18)
Мощностью последовательности
x(n) называется величина
![]() , (1.19)
, (1.19)
Для дискретных последовательностей сохраняются те же
закономерности, касающиеся ограничения мощности и энергии, что и для
непрерывных сигналов.
Периодической называют последовательность x(nT),
удовлетворяющую условию x(nT)=x(nT+mNT), где m и N –
целые числа. При этом N называют периодом
последовательности. Периодическую последовательность достаточно задать на
интервале периода, например при ![]() .
.
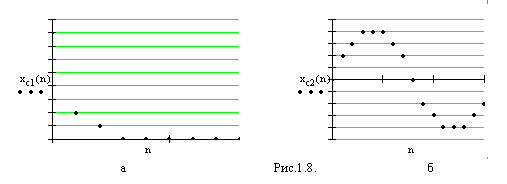
Цифровые сигналы представляют собой
дискретные сигналы, которые в дискретные моменты времени могут принимать лишь
конечный ряд дискретных значений – уровней квантования. Процесс преобразования
дискретного сигнала в цифровой называется квантованием по уровню. Цифровые
сигналы описываются квантованными решетчатыми функциями xц(nT).
Примеры цифровых сигналов представлены на рис. 1.8а и 1.8б.
Связь между решетчатой
функцией xд(nT)
и квантованной решетчатой функцией xц(nT)
определяется нелинейной функцией квантования xц(nT)=Fk(xд(nT)).
Каждый из уровней квантования кодируется числом. Обычно для эих
целей используется двоичное кодирование, так, что квантованные отсчеты xц(nT)
кодируются двоичными числами с n разрядами. Число уровней
квантования N и наименьшее число двоичных разрядов m, с
помощью которых можно закодировать все эти уровни, связаны соотношением
![]() , (1.20)
, (1.20)
где int(x) – наименьшее целое число, не меньшее x.
Т.о., квантование дискретных
сигналов состоит в представлении отсчета сигнала xд(nT) с помощью двоичного числа,
содержащего m разрядов. В результате квантования отсчет
представляется с ошибкой, которая называется ошибкой квантования
![]() . (1.21)
. (1.21)
Шаг квантования Q определяется весом младшего
двоичного разряда результирующего числа
![]() . (1.22)
. (1.22)
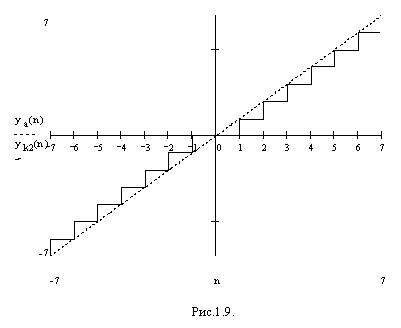
Основными способами квантования являются усечение и
округление.
Усечение до m-разрядного двоичного числа состоит в
отбрасывании всех младших разрядов числа кроме n старших. При этом ошибка усечения ![]() . Для положительных чисел при любом способе кодирования
. Для положительных чисел при любом способе кодирования ![]() . Для отрицательных чисел при использовании прямого кода
ошибка усечения неотрицательна
. Для отрицательных чисел при использовании прямого кода
ошибка усечения неотрицательна ![]() , а при использовании дополнительного кода эта ошибка неположительна
, а при использовании дополнительного кода эта ошибка неположительна ![]() . Таким образом, во всех случаях абсолютнок
значение ошибки усечения не превосходит шага квантования:
. Таким образом, во всех случаях абсолютнок
значение ошибки усечения не превосходит шага квантования:
![]() . (1.23)
. (1.23)
График функции усечения
дополнительного кода представлен на рис.1.9, а прямого кода – на рис.1.10.
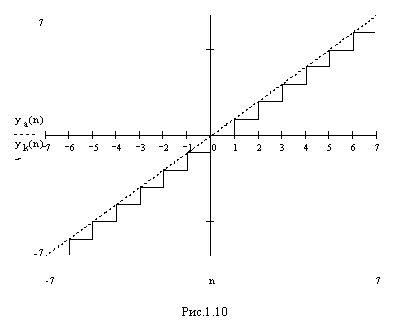
Округление отличается от
усечения тем, что кроме отбрасывания младших разрядов числа модифицируется и m-й (младший неотбрасываемый)
разряд числа. Его модификация заключается в том, что он либо остается
неизменным или увеличивается на единицу в зависимости от того, больше или
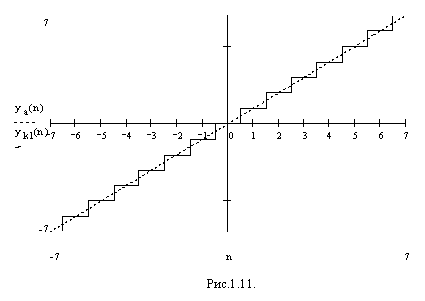
меньше отбрасываемая часть числа величины ![]() . Округление можно практически выполнить путем прибавления
единицы к (m+1) – муразряду числа с
последующим усечением полученного числа до n разрядов. Ошибка округления
при всех способах кодирования лежит в пределах
. Округление можно практически выполнить путем прибавления
единицы к (m+1) – муразряду числа с
последующим усечением полученного числа до n разрядов. Ошибка округления
при всех способах кодирования лежит в пределах ![]() и, следовательно,
и, следовательно,
![]() . (1.24)
. (1.24)
График функции округления представлен на рис. 1.11.
Рассмотрение и использование
различных сигналов предполагает возможность измерения значения этих сигналов в
заданные моменты времени. Естественно возникает вопрос о достоверности (или
наоборот, неопределенности) измерения значения сигналов. Этими вопросами
занимается теория информации,
основоположником которой является К.Шеннон. Основная идея теории информации
состоит в том, что с информацией можно обращаться почти также, как с такими
физическими величинами как масса и энергия.
Точность
измерений мы обычно характеризуем числовыми значениями полученных при измерении
или предполагаемых погрешностей. При этом используются понятия абсолютной и
относительной погрешностей. Если измерительное устройство имеет диапазон
измерения от x1 до x2, с абсолютной погрешностью ±D, не зависящей от текущего
значения x измеряемой величины, то получив
результат измерения в виде xn мы записываем
его как xn±D и характеризуем
относительной погрешностью ![]() .
.
Рассмотрение
этих же самых действий с позиции теории информации носит несколько иной
характер, отличающийся тем, что всем перечисленным понятиям придается
вероятностный, статистический смысл, а итог проведенного измерения
истолковывается как сокращение области неопределенности измеряемой величины. В
теории информации тот факт, что измерительный прибор имеет
диапазон измерения от x1
до x2
означает, что при использовании этого прибора могут бытьполучены
показания только в пределах от x1 до x2. Другими словами,
вероятность получения отсчетов, меньших x1 или больших x2, равна 0. Вероятность же
получения отсчетв где-то в пределах от x1 до x2 равна 1.
Если предположить, что все результаты измерения в пределах от x1 до x2 равновероятны,
т.е. плотность распределения вероятности для различных значений измеряемой
величины вдоль всей шкалы прибора одинакова, то с точки зрения теории
информации наше знание о значении измеряемой величины до измерения может быть
представлено графиком распределения плотности вероятности p(x).
Поскольку полная вероятность получить отсчет где-то
в пределах от x1 до x2 равна 1, то под кривой
должна быть заключена площадь, равная 1, а это значит, что
![]() (1.25).
(1.25).
После
проведения измерения получаем показание прибора, равное xn. Однако, вследствие погрешности прибора,
равной ±D, мы не можем утверждать,
что измеряемая величина точно равна xn. Поэтому мы записывает
результат в виде xn±D. Это означает, что
действительное значение измеряемой величины x лежит где-то в пределах от xn-D до xn+D. С точки зрения теории информации результат нашего
измерения состоит лишь в том, что область неопределенности сократилась до
величины 2D и характеризуется
намного большей плотностью ве5роятности
![]() (1.26).
(1.26).
Получение
каой-либо информации об интересующей нас величине
заключается, таким образом, в уменьшении неопределенности ее значения.
В
качестве характеристики неопределенности значения некоторой случайной величины
К.Шеннон ввел понятие энтропии
величины x, которая вычисляется как
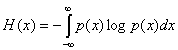 (1.27).
(1.27).
Единицы
измерения энтропии зависят от выбора основания логарифма в приведенных
выражениях. При использовании десятичных логарифмов энтропия измеряется в т.н.
десятичных единицах или дитах.
В случае же использования двоичных логарифмов энтропия выражается в двоичных
единицах или битах.
В
большинстве случаев неопределенность знания о значении сигнала определяется
действием помех или шумов. Дезинформационное действие шума при передаче сигнала
определяется энтропией шума как случайной величины. Если шум в вероятностном
смысле не зависит от передаваемого сигнала, то независимо от статистики сигнала
шуму можно приписывать определенную величину энтропии, которая и характеризует
его дезинформационное действие. При этом анализ системы можно проводить
раздельно для шума и сигнала, что резко упрощает решение этой задачи.
Теорема Шеннона о количестве информации.
Если на вход канала передачи информации подается сигнал с энтропией H(x), а шум в канале имеет энтропию H(D), то количество информации на выходе канала определяется как
![]() (1.28).
(1.28).
Если
кроме основного канала передачи сигнала имеется дополнительный канал, то для
исправления ошибок, возникших от шума с энтропией H(D), по этому каналу необходтмо передать дополнительное количество информации,
не меньшее чем
![]() (1.29).
(1.29).
Эти данные можно так закодировать, что будет
возможно скорректировать все ошибки, вызванные шумом, за исключением
произвольно малой доли этих ошибок.
В нашем случае, для равномерно
распределенной случайной величины, энтропия определяется как
 (1.30),
(1.30),
а оставшаяся или условная энтропия результата измерения после получения отсчета xn равна
 (1.31).
(1.31).
Отсюда полученное количество информации равное
разности исходной и оставшейся энтропии равно
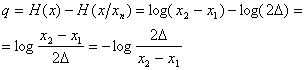 (1.32).
(1.32).
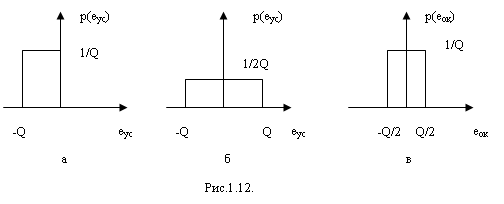
При анализе систем с
цифровыми сигналами ошибки квантования рассматриваются как стационарный
случайный процесс с равномерным распределением вероятности по диапазону
распределения ошибки квантования. На рис. 1.12а, б и в
приведены плотности вероятности ошибки квантования при округлении
дополнительного кода, прямого кода и усечении соответственно.
Очевидно, что квантование является нелинейной операцией. Однако, при анализе используется линейная модель квантования сигналов, представленная на рис. 1.13.
Рис.1.13.
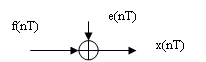
где f(nT)
– дискретный сигнал, x(nT)
– квантованный m – разрядный цифровой сигнал, e(nT) – ошибка квантования.
Вероятностные
оценки ошибок квантования делаются с помощью вычисления математического
ожидания
 (1.33)
(1.33)
и дисперсии
![]() (1.34),
(1.34),
где pe – плотность вероятности
ошибки. Для случаев округления и усечения будем иметь
 (1.35),
(1.35),
 (1.36).
(1.36).
Временная дискретизация и
квантование по уровню сигналов являются неотъемлемыми особенностями всех
микропроцессорных систем управления, определяемыми ограниченным быстродействием
и конечной разрядностью используемых микропроцессоров.